10. 几何重建#
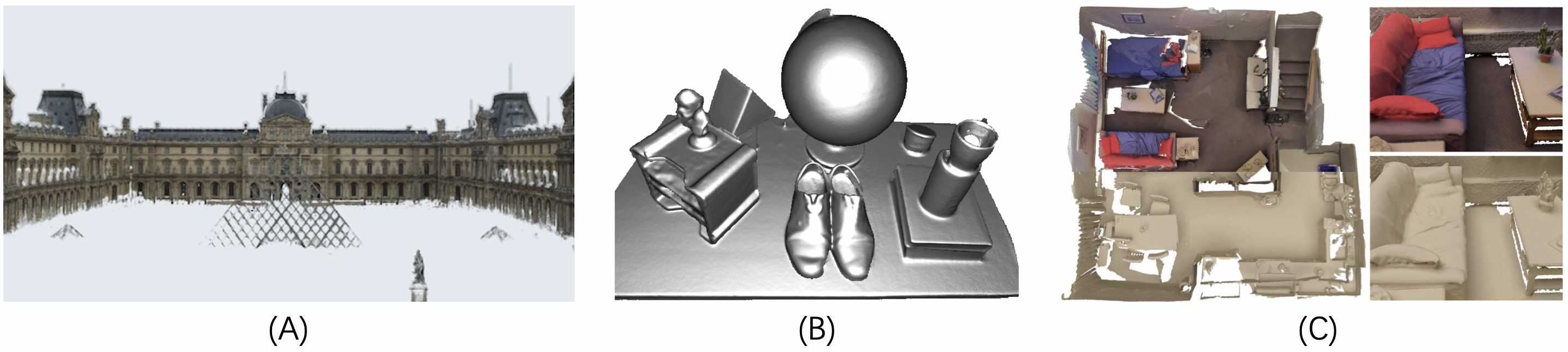
图 10.1 现实场景的几何重建。A:基于 COLMAP 进行室外场景点云重建。B:使用 KinectFusion 对桌面进行表面重建。C:使用 BundleFusion 对室内场景进行表面重建。#
几何重建旨在对现实世界的物体或场景进行建模,研究如何恢复目标物体或场景的三维几何形状,如 图 10.1 所示。作为几何建模的重要手段,几何重建是计算机视觉和计算机图形学中的一个经典问题。它不仅是实现虚拟现实、增强现实、和无人驾驶等技术的基础,在机器人领域中也有重要的应用价值,是实现机器人定位和导航的关键技术。经典的几何重建依赖特殊的传感设备(如深度相机)来直接感知三维空间中的几何形状,将目标对象表示为一组点云(point cloud)。形式上来说,点云是指一组三维空间中坐标点的集合:\(\left\{(x_i,y_i,z_i)|i=1,\dots,N\right\}\)。本章我们将围绕点云这一三维表示方法(3D representation),介绍从传感器获取点云的原理、不同区域间的点云如何进行融合配准,从而揭示几何重建过程中的算法细节;此外,本章还将介绍将点云转化为网格模型的后处理算法,包括表面提取和形状拟合,从而在两种不同的三维表示方法之间建立联系。