7.1. 图像滤波#
图像滤波(image filtering) 是一种图像处理技术,用于改善图像质量、去除噪声和突出图像中的特定特征。它的核心是卷积(convolution),不同的卷积核就对应着不同的功能。我们下面先介绍卷积的数学原理,再介绍几种常用的滤波器。
7.1.1. 卷积#
在一维情况下,两个连续函数 \(f(t)\) 和 \(g(t)\) 的卷积 \(h(t)\) 定义为:
在离散情况下我们可以给出对应的形式:
对于滤波而言,我们可以认为公式 (7.2) 中的 \(f\) 是我们的输入信号,\(g\) 称为卷积核(kernel),或者滤波器(filter),\(h\) 是最终输出的信号。尽管公式 (7.2) 中的求和上下限是无穷,我们可以暂时假定 \(f\) 和 \(g\) 都是有限的数组,在范围外都取 0。注意到 \(g[t-\tau]\) 可以看成是先将 \(g[\tau]\) 镜像然后再向右平移 \(t\) 位:\(g[0]\) 被移到了 \(g[t]\),\(g[1]\) 被移到了 \(g[t-1]\),以此类推。因此得到 \(h[t]\) 的过程相当于我们将镜像过的 \(g[\tau]\) 在 \(f[\tau]\) 上滑动 \(t\) 位,然后把两个数组对应位置相乘再相加,如图 7.2 所示。
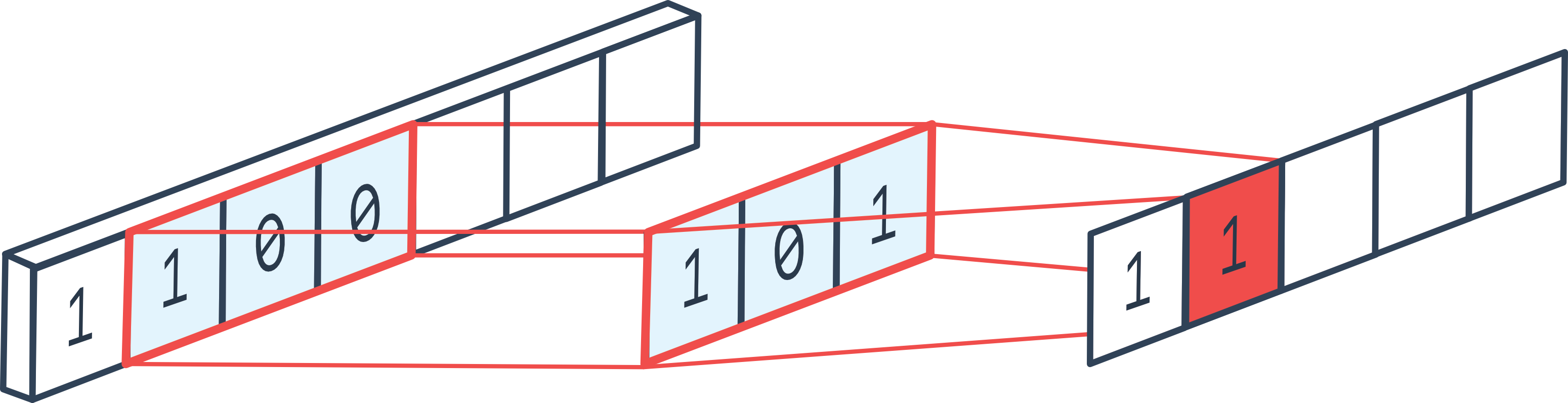
图 7.2 一维卷积的过程#
一般情况我们会把卷积核取得比较短,比如我们可以取一个全为 \(1/3\) 的长度为 3 的数组,那么卷积的结果 \(h[t]\) 就是把 \(f[t]\) 相邻的三个数相加起来平均,此时卷积就是一个滑动窗口平均的过程。二维的卷积我们可以类似的定义:
我们在 §5 介绍了傅里叶变换,可以将一个时域的信号 \(f(t)\) 变换到频域 \(F(\omega) = \mathcal{F}(f(t))\),提供一个新的视角。事实上,卷积与傅里叶变换密切相关,由卷积定理(convolution theorem) 给出:函数卷积的傅里叶变换是函数傅里叶变换的乘积,函数乘积的傅里叶变换是函数傅里叶变换的卷积。对应的数学表述为:
这个定理揭示了卷积和乘积在时域和频域中可以相互转换。我们使用卷积进行图片滤波,其实可以看成是对其频域进行乘积变换。我们在图 5.6 中展示了频谱可以直接反映图片的特征,那么针对性设计卷积核就能达到想要的滤波效果。
7.1.2. 图像模糊#
最简单的模糊滤波器是均值滤波器(mean filter),定义为:
根据卷积的定义,均值滤波器的作用就是取临近的 \((2k+1) \times (2k+1)\) 个像素求平均,其效果如图 7.4 所示。

图 7.4 从左到右:原图,使用 \(3\times 3\) 的均值滤波,使用 \(5 \times 5\) 的均值滤波#
从频域上我们也能理解均值滤波器为什么能够模糊化。如图 7.5 所示,均值滤波器的傅里叶变换呈现中间值大,边缘值小的趋势,于是当其与图像的频谱相乘时,就保留了中心的低频部分,而去除的高频部分。

图 7.5 均值滤波器的傅里叶变换#
然而从图 7.5 中我们也能发现,均值滤波器的频谱并不是严格的只有低频部分,还有十字星形向外放射的部分。这导致图片中的一部分高频信息可能被错误地保留了下来,造成视觉上的走样。如图 7.6 所示,使用均值滤波可能造成细节的错误。
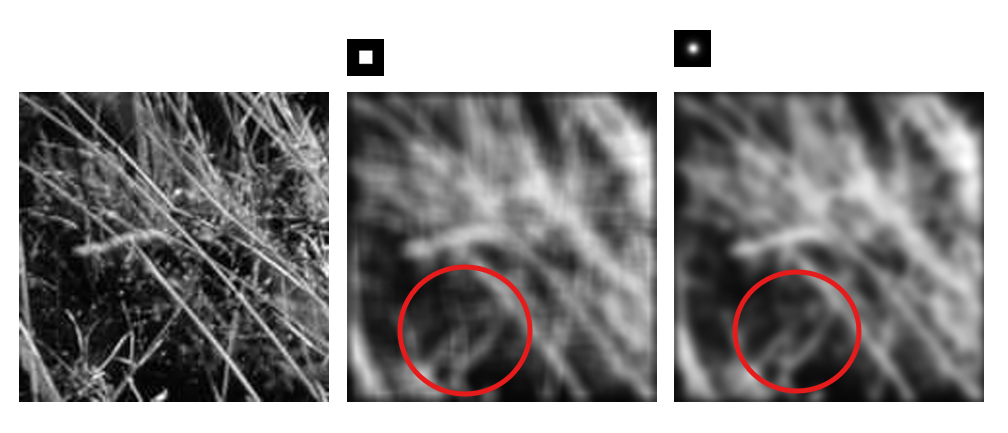
图 7.6 从左到右:原图,使用均值滤波,使用高斯滤波 from Rutgers CS334#
高斯滤波器(Gaussian filter) 是效果更好的模糊滤波器,它的连续形式为:
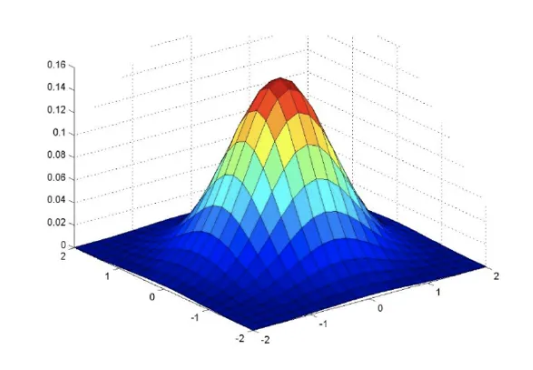
图 7.7 高斯滤波器的形状#
其中 \(\sigma\) 是方差。在实际使用时,我们可以截取中心附近的一个 \((2k+1) \times (2k+1)\) 的区域计算每个点上的权重并归一化,然后按照均值滤波一样的方式进行卷积。高斯滤波器比均值滤波器的优势在于:我们可以数学上证明高斯核的傅里叶变换依然是一个高斯函数。因此,高斯卷积核能够更好地分离低频和高频分量,避免在模糊化时产生走样,效果如图 7.6 所示。
7.1.3. 边缘提取#
边缘滤波器(edge filter) 的作用是提取出图片中的边缘,输出图片只会保留输入图片中的边界部分。所谓“边界”,就是指图像中一个颜色块过渡到另一个颜色块的交界处,所以边界上的颜色变化比较大,换言之,梯度较大。利用这一点,我们可以借助一个估计梯度的算子来提取边界。我们可以构造两个滤波器分别计算图片在两个方向的梯度:
可以从公式中发现 \(\mathbf{G}_x\) 可以提取水平方向的梯度,而在竖直方向做了模糊;\(\mathbf{G}_y\) 则正好相反。应用这两个滤波器的结果如 图 7.8 所示。
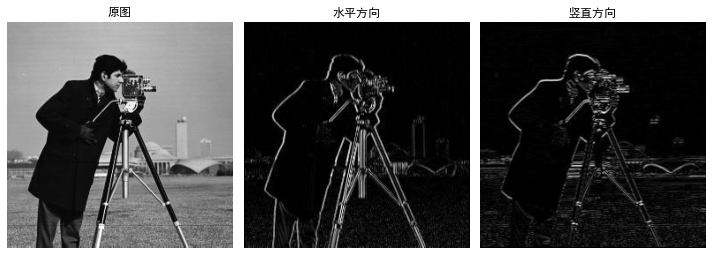
图 7.8 从左到右:原图,使用水平滤波 \(\mathbf{G}_x\),使用竖直滤波器 \(\mathbf{G}_y\)#
如果想要检测到各个方向的边缘,我们需要同时考虑两个方向的梯度,比如考虑梯度的模长:
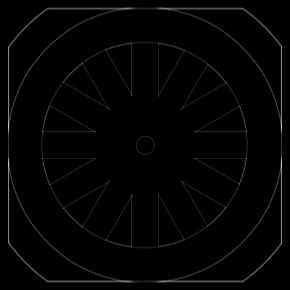
我们可以在应用了公式 (7.7) 中的滤波器之后,再求公式 (7.8) 中的模长,得到最后的结果,如图 7.9 所示。

图 7.9 使用 Sobel 滤波器提取边缘的结果#
这样提取边缘的滤波器称为 Sobel-Feldman 滤波器,由 Irwin Sobel 和 Gary M. Feldman 合作提出。注意由于滤波器里包含了取模长的操作,Sobel-Feldman 滤波器就不再是线性滤波器了。
除了使用一阶导,我们还可以使用二阶导来提取边缘。在一维情况下,\(f[x]\) 的二阶导可以计算为:
这可以对应到卷积核为 \([1, -2, 1]\) 的卷积过程。在二维中,我们可以使用连续情况下的拉普拉斯算子(Laplacian operator):\(\nabla^2 f = \frac{\partial^2 f}{\partial x^2} + \frac{\partial^2 f}{\partial y^2}\),类似一维情况,其对应的二维卷积核为:
这个卷积核称为 Laplacian 卷积核,其效果如图 7.10 所示。

除了上面介绍的边缘提取滤波器外,还有 Roberts 滤波器,Scharr 滤波器,Canny 滤波器等等,这里就不展开了。